




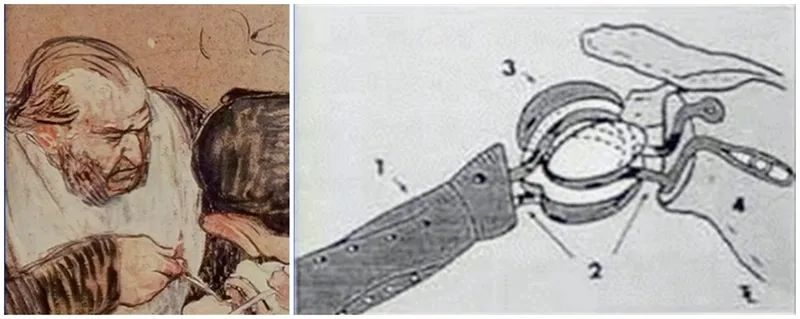
ಕೃತಕ ಭುಜ ಬದಲಿ ಪರಿಕಲ್ಪನೆಯನ್ನು ಮೊದಲು 1891 ರಲ್ಲಿ ಥೆಮಿಸ್ಟೋಕಲ್ಸ್ ಗ್ಲಕ್ ಪ್ರಸ್ತಾಪಿಸಿದರು. ಉಲ್ಲೇಖಿಸಲಾದ ಮತ್ತು ಒಟ್ಟಿಗೆ ವಿನ್ಯಾಸಗೊಳಿಸಲಾದ ಕೃತಕ ಕೀಲುಗಳಲ್ಲಿ ಸೊಂಟ, ಮಣಿಕಟ್ಟು ಇತ್ಯಾದಿ ಸೇರಿವೆ. ಮೊದಲ ಭುಜ ಬದಲಿ ಶಸ್ತ್ರಚಿಕಿತ್ಸೆಯನ್ನು 1893 ರಲ್ಲಿ ಫ್ರೆಂಚ್ ಶಸ್ತ್ರಚಿಕಿತ್ಸಕ ಜೂಲ್ಸ್ ಎಮಿಲ್ ಪಿಯಾನ್ ಅವರು ಪ್ಯಾರಿಸ್ನ ಹಾಸ್ಪಿಟಲ್ ಇಂಟರ್ನ್ಯಾಷನಲ್ನಲ್ಲಿ ಕೀಲುಗಳು ಮತ್ತು ಮೂಳೆಗಳ ಕ್ಷಯರೋಗದಿಂದ ಬಳಲುತ್ತಿರುವ 37 ವರ್ಷದ ರೋಗಿಯ ಮೇಲೆ ನಡೆಸಿದರು. ಮೊದಲ ದಾಖಲಿತ ಭುಜದ ಆರ್ತ್ರೋಪ್ಲ್ಯಾಸ್ಟಿ. ಪ್ರಾಸ್ಥೆಸಿಸ್ ಅನ್ನು ಪ್ಯಾರಿಸ್ನ ದಂತವೈದ್ಯ ಜೆ. ಪೋರ್ಟರ್ ಮೈಕೆಲ್ಸ್ ಮತ್ತು ಹ್ಯೂಮರಲ್ ಮಾಡಿದ್ದಾರೆ.ಕಾಂಡಪ್ಲಾಟಿನಂ ಲೋಹದಿಂದ ಮಾಡಲ್ಪಟ್ಟಿದ್ದು, ಪ್ಯಾರಾಫಿನ್-ಲೇಪಿತ ರಬ್ಬರ್ ತಲೆಗೆ ತಂತಿಯ ಮೂಲಕ ಜೋಡಿಸಿ ನಿರ್ಬಂಧಿತ ಇಂಪ್ಲಾಂಟ್ ಅನ್ನು ರೂಪಿಸಲಾಯಿತು. ರೋಗಿಯ ಆರಂಭಿಕ ಫಲಿತಾಂಶಗಳು ತೃಪ್ತಿಕರವಾಗಿದ್ದವು, ಆದರೆ ಕ್ಷಯರೋಗದ ಬಹು ಪುನರಾವರ್ತನೆಗಳಿಂದಾಗಿ 2 ವರ್ಷಗಳ ನಂತರ ಕೃತಕ ಅಂಗವನ್ನು ಅಂತಿಮವಾಗಿ ತೆಗೆದುಹಾಕಲಾಯಿತು. ಕೃತಕ ಭುಜ ಬದಲಿಯಲ್ಲಿ ಮಾನವರು ಮಾಡಿದ ಮೊದಲ ಪ್ರಯತ್ನ ಇದು.
1951 ರಲ್ಲಿ, ಫ್ರೆಡೆರಿಕ್ ಕ್ರೂಗರ್, ಜೀವಸತ್ವಗಳಿಂದ ಮಾಡಲ್ಪಟ್ಟ ಮತ್ತು ಶವದ ಪ್ರಾಕ್ಸಿಮಲ್ ಹ್ಯೂಮರಸ್ನಿಂದ ಅಚ್ಚೊತ್ತಿದ ಹೆಚ್ಚು ಅಂಗರಚನಾಶಾಸ್ತ್ರೀಯವಾಗಿ ಮಹತ್ವದ ಭುಜದ ಕೃತಕ ಅಂಗದ ಬಳಕೆಯನ್ನು ವರದಿ ಮಾಡಿದರು. ಹ್ಯೂಮರಲ್ ತಲೆಯ ಆಸ್ಟಿಯೋನೆಕ್ರೋಸಿಸ್ ಇರುವ ಯುವ ರೋಗಿಗೆ ಚಿಕಿತ್ಸೆ ನೀಡಲು ಇದನ್ನು ಯಶಸ್ವಿಯಾಗಿ ಬಳಸಲಾಯಿತು.
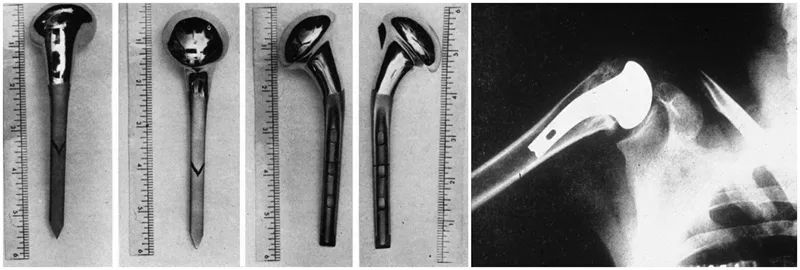
ಆದರೆ ನಿಜವಾಗಿಯೂ ಆಧುನಿಕ ಭುಜ ಬದಲಿ ಶಸ್ತ್ರಚಿಕಿತ್ಸೆಯನ್ನು ಭುಜದ ಗುರು ಚಾರ್ಲ್ಸ್ ನೀರ್ ವಿನ್ಯಾಸಗೊಳಿಸಿದರು ಮತ್ತು ಅಭಿವೃದ್ಧಿಪಡಿಸಿದರು. 1953 ರಲ್ಲಿ, ಪ್ರಾಕ್ಸಿಮಲ್ ಹ್ಯೂಮರಲ್ ಮುರಿತಗಳ ಶಸ್ತ್ರಚಿಕಿತ್ಸೆಯ ಚಿಕಿತ್ಸೆಯ ಅತೃಪ್ತಿಕರ ಫಲಿತಾಂಶಗಳನ್ನು ಪರಿಹರಿಸುವ ಸಲುವಾಗಿ, ನೀರ್ ಹ್ಯೂಮರಲ್ ತಲೆಯ ಮುರಿತಗಳಿಗೆ ಅಂಗರಚನಾಶಾಸ್ತ್ರದ ಪ್ರಾಕ್ಸಿಮಲ್ ಹ್ಯೂಮರಲ್ ಪ್ರಾಸ್ಥೆಸಿಸ್ ಅನ್ನು ಅಭಿವೃದ್ಧಿಪಡಿಸಿದರು, ಇದನ್ನು ಮುಂದಿನ ಎರಡು ದಶಕಗಳಲ್ಲಿ ಕ್ರಮವಾಗಿ ಹಲವಾರು ಬಾರಿ ಸುಧಾರಿಸಲಾಯಿತು. ಎರಡನೇ ಮತ್ತು ಮೂರನೇ ತಲೆಮಾರಿನ ಕೃತಕ ಅಂಗಗಳನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸಲಾಯಿತು.
೧೯೭೦ ರ ದಶಕದ ಆರಂಭದಲ್ಲಿ, ತೀವ್ರವಾದ ಆವರ್ತಕ ಪಟ್ಟಿಯ ಅಪಸಾಮಾನ್ಯ ಕ್ರಿಯೆಯಿಂದ ಬಳಲುತ್ತಿರುವ ರೋಗಿಗಳಲ್ಲಿ ಭುಜದ ಬದಲಿ ಚಿಕಿತ್ಸೆಯನ್ನು ಪರಿಹರಿಸಲು, ರಿವರ್ಸ್ ಶೋಲ್ಡರ್ ಆರ್ತ್ರೋಪ್ಲ್ಯಾಸ್ಟಿ (RTSA) ಪರಿಕಲ್ಪನೆಯನ್ನು ಮೊದಲು ನೀರ್ ಪ್ರಸ್ತಾಪಿಸಿದರು, ಆದರೆ ಗ್ಲೆನಾಯ್ಡ್ ಘಟಕದ ಆರಂಭಿಕ ವೈಫಲ್ಯದಿಂದಾಗಿ, ಈ ಪರಿಕಲ್ಪನೆಯನ್ನು ನಂತರ ಕೈಬಿಡಲಾಯಿತು. ೧೯೮೫ ರಲ್ಲಿ, ಪಾಲ್ ಗ್ರಾಮಾಂಟ್ ನೀರ್ ಪ್ರಸ್ತಾಪಿಸಿದ ಪರಿಕಲ್ಪನೆಯ ಪ್ರಕಾರ ಸುಧಾರಿಸಿದರು, ತಿರುಗುವಿಕೆಯ ಕೇಂದ್ರವನ್ನು ಮಧ್ಯ ಮತ್ತು ದೂರಕ್ಕೆ ಚಲಿಸಿದರು, ಡೆಲ್ಟಾಯ್ಡ್ನ ಕ್ಷಣ ತೋಳು ಮತ್ತು ಒತ್ತಡವನ್ನು ಬದಲಾಯಿಸಿದರು, ಹೀಗಾಗಿ ಆವರ್ತಕ ಪಟ್ಟಿಯ ಕಾರ್ಯ ನಷ್ಟದ ಸಮಸ್ಯೆಯನ್ನು ಸಂಪೂರ್ಣವಾಗಿ ಪರಿಹರಿಸಿದರು.
ಟ್ರಾನ್ಸ್-ಶೋಲ್ಡರ್ ಪ್ರಾಸ್ಥೆಸಿಸ್ನ ವಿನ್ಯಾಸ ತತ್ವಗಳು
ರಿವರ್ಸ್ ಶೋಲ್ಡರ್ ಆರ್ತ್ರೋಪ್ಲ್ಯಾಸ್ಟಿ (RTSA) ಭುಜದ ಸ್ಥಿರತೆಯನ್ನು ಪುನಃಸ್ಥಾಪಿಸಲು ನೈಸರ್ಗಿಕ ಭುಜದ ಅಂಗರಚನಾ ಸಂಬಂಧವನ್ನು ಹಿಮ್ಮುಖಗೊಳಿಸುತ್ತದೆ. RTSA ಗ್ಲೆನಾಯ್ಡ್ ಸೈಡ್ ಪೀನ ಮತ್ತು ಹ್ಯೂಮರಲ್ ಹೆಡ್ ಸೈಡ್ ಕಾನ್ಕೇವ್ ಮಾಡುವ ಮೂಲಕ ಫುಲ್ಕ್ರಮ್ ಮತ್ತು ತಿರುಗುವಿಕೆಯ ಕೇಂದ್ರವನ್ನು (CoR) ಸೃಷ್ಟಿಸುತ್ತದೆ. ಡೆಲ್ಟಾಯ್ಡ್ ಸ್ನಾಯು ಮೇಲಿನ ತೋಳನ್ನು ಅಪಹರಿಸಲು ಸಂಕುಚಿತಗೊಂಡಾಗ ಹ್ಯೂಮರಲ್ ಹೆಡ್ ಮೇಲಕ್ಕೆ ಚಲಿಸದಂತೆ ತಡೆಯುವುದು ಈ ಫುಲ್ಕ್ರಮ್ನ ಬಯೋಮೆಕಾನಿಕಲ್ ಕಾರ್ಯವಾಗಿದೆ. RTSA ಯ ವೈಶಿಷ್ಟ್ಯವೆಂದರೆ ಕೃತಕ ಭುಜದ ಜಂಟಿಯ ತಿರುಗುವಿಕೆಯ ಕೇಂದ್ರ ಮತ್ತು ನೈಸರ್ಗಿಕ ಭುಜಕ್ಕೆ ಸಂಬಂಧಿಸಿದಂತೆ ಹ್ಯೂಮರಲ್ ಹೆಡ್ನ ಸ್ಥಾನವು ಒಳಮುಖವಾಗಿ ಮತ್ತು ಕೆಳಮುಖವಾಗಿ ಚಲಿಸುತ್ತದೆ. ವಿಭಿನ್ನ RTSA ಪ್ರಾಸ್ಥೆಸಿಸ್ ವಿನ್ಯಾಸಗಳು ವಿಭಿನ್ನವಾಗಿವೆ. ಹ್ಯೂಮರಲ್ ಹೆಡ್ ಅನ್ನು 25~40mm ಕೆಳಗೆ ಚಲಿಸಲಾಗುತ್ತದೆ ಮತ್ತು 5~20mm ಒಳಮುಖವಾಗಿ ಚಲಿಸಲಾಗುತ್ತದೆ.
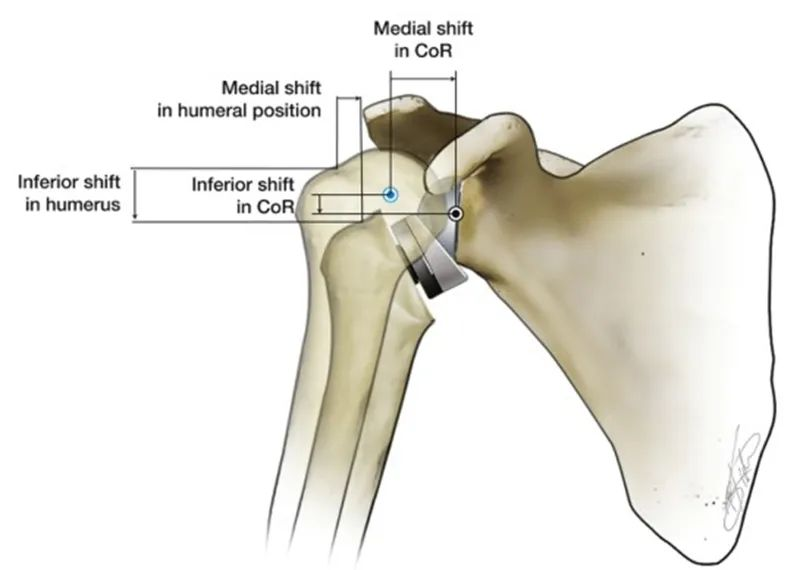
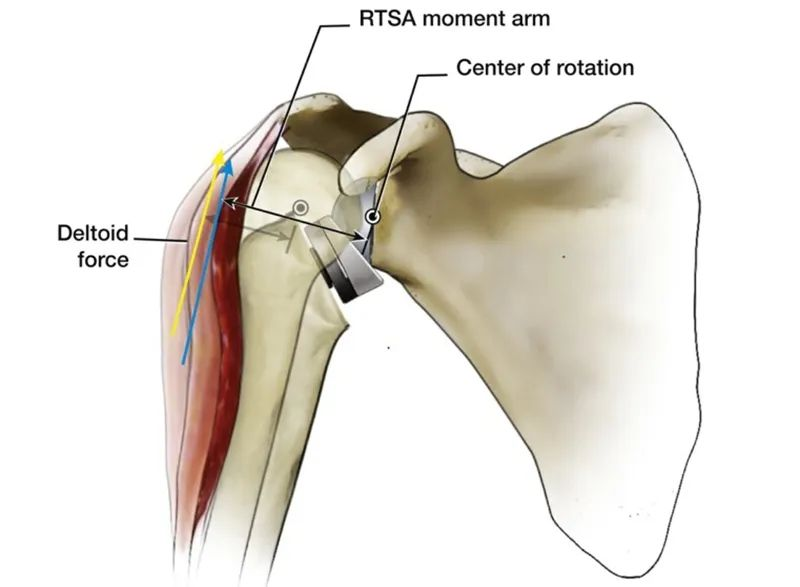
ಮಾನವ ದೇಹದ ನೈಸರ್ಗಿಕ ಭುಜದ ಜಂಟಿಗೆ ಹೋಲಿಸಿದರೆ, ಆಂತರಿಕವಾಗಿ ಬದಲಾಯಿಸುವ CoR ನ ಸ್ಪಷ್ಟ ಪ್ರಯೋಜನವೆಂದರೆ ಡೆಲ್ಟಾಯ್ಡ್ನ ಅಪಹರಣ ಕ್ಷಣ ತೋಳನ್ನು 10mm ನಿಂದ 30mm ಗೆ ಹೆಚ್ಚಿಸಲಾಗಿದೆ, ಇದು ಡೆಲ್ಟಾಯ್ಡ್ನ ಅಪಹರಣ ದಕ್ಷತೆಯನ್ನು ಸುಧಾರಿಸುತ್ತದೆ ಮತ್ತು ಕಡಿಮೆ ಸ್ನಾಯು ಬಲವನ್ನು ಉತ್ಪಾದಿಸಬಹುದು. ಅದೇ ಟಾರ್ಕ್, ಮತ್ತು ಈ ವೈಶಿಷ್ಟ್ಯವು ಹ್ಯೂಮರಲ್ ತಲೆಯ ಅಪಹರಣವನ್ನು ಸಂಪೂರ್ಣ ಆವರ್ತಕ ಪಟ್ಟಿಯ ಖಿನ್ನತೆಯ ಕಾರ್ಯದ ಮೇಲೆ ಸಂಪೂರ್ಣವಾಗಿ ಅವಲಂಬಿತವಾಗಿಲ್ಲದಂತೆ ಮಾಡುತ್ತದೆ.
ಇದು RTSA ಯ ವಿನ್ಯಾಸ ಮತ್ತು ಬಯೋಮೆಕಾನಿಕ್ಸ್, ಮತ್ತು ಇದು ಸ್ವಲ್ಪ ಬೇಸರದ ಮತ್ತು ಅರ್ಥಮಾಡಿಕೊಳ್ಳಲು ಕಷ್ಟಕರವಾಗಬಹುದು. ಇದನ್ನು ಅರ್ಥಮಾಡಿಕೊಳ್ಳಲು ಸರಳವಾದ ಮಾರ್ಗವಿದೆಯೇ? ಉತ್ತರ ಹೌದು.
ಮೊದಲನೆಯದು RTSA ಯ ವಿನ್ಯಾಸ. ಮಾನವ ದೇಹದ ಪ್ರತಿಯೊಂದು ಕೀಲುಗಳ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಎಚ್ಚರಿಕೆಯಿಂದ ಗಮನಿಸಿ, ನಾವು ಕೆಲವು ನಿಯಮಗಳನ್ನು ಕಾಣಬಹುದು. ಮಾನವ ಕೀಲುಗಳನ್ನು ಸ್ಥೂಲವಾಗಿ ಎರಡು ವರ್ಗಗಳಾಗಿ ವಿಂಗಡಿಸಬಹುದು. ಒಂದು ಭುಜಗಳು ಮತ್ತು ಸೊಂಟಗಳಂತಹ ಹತ್ತಿರದ ಕಾಂಡದ ಕೀಲುಗಳು, ಸಮೀಪದ ತುದಿಯು "ಕಪ್" ಮತ್ತು ದೂರದ ತುದಿಯು "ಚೆಂಡು" ಆಗಿರುತ್ತದೆ.
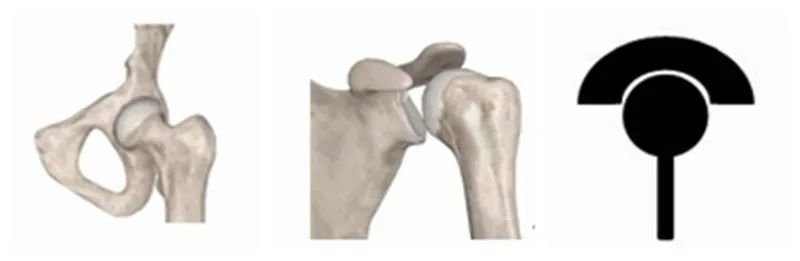
ಇನ್ನೊಂದು ವಿಧವೆಂದರೆ ದೂರದ ಕೀಲುಗಳು, ಉದಾಹರಣೆಗೆಮೊಣಕಾಲುಗಳುಮತ್ತು ಮೊಣಕೈಗಳು, ಸಮೀಪದ ತುದಿಯು "ಚೆಂಡು" ಮತ್ತು ದೂರದ ತುದಿಯು "ಕಪ್" ಆಗಿರುತ್ತದೆ.

ಆರಂಭಿಕ ದಿನಗಳಲ್ಲಿ ಕೃತಕ ಭುಜದ ಕೀಲು ಕೃತಕ ಅಂಗಗಳನ್ನು ವಿನ್ಯಾಸಗೊಳಿಸುವಾಗ ವೈದ್ಯಕೀಯ ಪ್ರವರ್ತಕರು ಅಳವಡಿಸಿಕೊಂಡ ಯೋಜನೆಯು ನೈಸರ್ಗಿಕ ಭುಜದ ಅಂಗರಚನಾ ರಚನೆಯನ್ನು ಸಾಧ್ಯವಾದಷ್ಟು ಪುನಃಸ್ಥಾಪಿಸುವುದಾಗಿತ್ತು, ಆದ್ದರಿಂದ ಎಲ್ಲಾ ಯೋಜನೆಗಳನ್ನು ಸಮೀಪದ ತುದಿಯನ್ನು "ಕಪ್" ಆಗಿ ಮತ್ತು ದೂರದ ತುದಿಯನ್ನು "ಚೆಂಡು" ಆಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಲಾಗಿದೆ. ಕೆಲವು ಸಂಶೋಧಕರು ಮಾನವನಂತೆಯೇ ಜಂಟಿ ಸ್ಥಿರತೆಯನ್ನು ಹೆಚ್ಚಿಸುವ ಸಲುವಾಗಿ "ಕಪ್" ಅನ್ನು ದೊಡ್ಡದಾಗಿ ಮತ್ತು ಆಳವಾಗಿ ವಿನ್ಯಾಸಗೊಳಿಸಿದ್ದಾರೆ.ಸೊಂಟದ ಕೀಲು, ಆದರೆ ಸ್ಥಿರತೆಯನ್ನು ಹೆಚ್ಚಿಸುವುದರಿಂದ ವೈಫಲ್ಯದ ಪ್ರಮಾಣ ಹೆಚ್ಚಾಗುತ್ತದೆ ಎಂದು ನಂತರ ಸಾಬೀತಾಯಿತು, ಆದ್ದರಿಂದ ಈ ವಿನ್ಯಾಸವನ್ನು ತ್ವರಿತವಾಗಿ ಅಳವಡಿಸಿಕೊಳ್ಳಲಾಯಿತು. ಬಿಟ್ಟುಬಿಡಿ. ಮತ್ತೊಂದೆಡೆ, RTSA ನೈಸರ್ಗಿಕ ಭುಜದ ಅಂಗರಚನಾ ಗುಣಲಕ್ಷಣಗಳನ್ನು ಹಿಮ್ಮುಖಗೊಳಿಸುತ್ತದೆ, "ಚೆಂಡು" ಮತ್ತು "ಕಪ್" ಅನ್ನು ತಲೆಕೆಳಗಾಗಿಸುತ್ತದೆ, ಮೂಲ "ಸೊಂಟ" ಕೀಲು "ಮೊಣಕೈ" ಅಥವಾ "ಮೊಣಕಾಲು" ನಂತೆ ಮಾಡುತ್ತದೆ. ಈ ವಿಧ್ವಂಸಕ ಬದಲಾವಣೆಯು ಅಂತಿಮವಾಗಿ ಕೃತಕ ಭುಜದ ಬದಲಿಯ ಅನೇಕ ತೊಂದರೆಗಳು ಮತ್ತು ಅನುಮಾನಗಳನ್ನು ಪರಿಹರಿಸಿತು ಮತ್ತು ಅನೇಕ ಸಂದರ್ಭಗಳಲ್ಲಿ, ಅದರ ದೀರ್ಘಕಾಲೀನ ಮತ್ತು ಅಲ್ಪಾವಧಿಯ ಪರಿಣಾಮಕಾರಿತ್ವವನ್ನು ಗಮನಾರ್ಹವಾಗಿ ಸುಧಾರಿಸಲಾಗಿದೆ.
ಅದೇ ರೀತಿ, RTSA ಯ ವಿನ್ಯಾಸವು ಡೆಲ್ಟಾಯ್ಡ್ ಅಪಹರಣ ದಕ್ಷತೆಯನ್ನು ಹೆಚ್ಚಿಸಲು ಅನುವು ಮಾಡಿಕೊಡಲು ತಿರುಗುವಿಕೆಯ ಕೇಂದ್ರವನ್ನು ಬದಲಾಯಿಸುತ್ತದೆ, ಇದು ಅಸ್ಪಷ್ಟವಾಗಿ ಧ್ವನಿಸಬಹುದು. ಮತ್ತು ನಾವು ನಮ್ಮ ಭುಜದ ಕೀಲುವನ್ನು ಸೀಸಾಗೆ ಹೋಲಿಸಿದರೆ, ಅದನ್ನು ಅರ್ಥಮಾಡಿಕೊಳ್ಳುವುದು ಸುಲಭ. ಕೆಳಗಿನ ಚಿತ್ರದಲ್ಲಿ ತೋರಿಸಿರುವಂತೆ, A ದಿಕ್ಕಿನಲ್ಲಿ (ಡೆಲ್ಟಾಯ್ಡ್ ಸಂಕೋಚನ ಬಲ) ಅದೇ ಟಾರ್ಕ್ ಅನ್ನು ಅನ್ವಯಿಸುವುದರಿಂದ, ಫುಲ್ಕ್ರಮ್ ಮತ್ತು ಆರಂಭಿಕ ಸ್ಥಾನವನ್ನು ಬದಲಾಯಿಸಿದರೆ, B ದಿಕ್ಕಿನಲ್ಲಿ ದೊಡ್ಡ ಟಾರ್ಕ್ (ಮೇಲಿನ ತೋಳಿನ ಅಪಹರಣ ಬಲ) ಉತ್ಪಾದಿಸಬಹುದು ಎಂಬುದು ಸ್ಪಷ್ಟವಾಗುತ್ತದೆ.
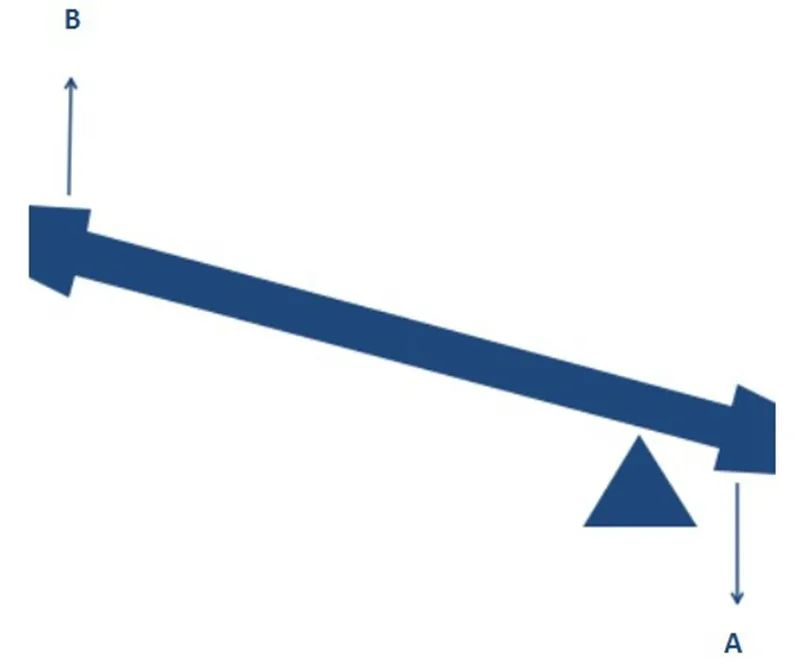
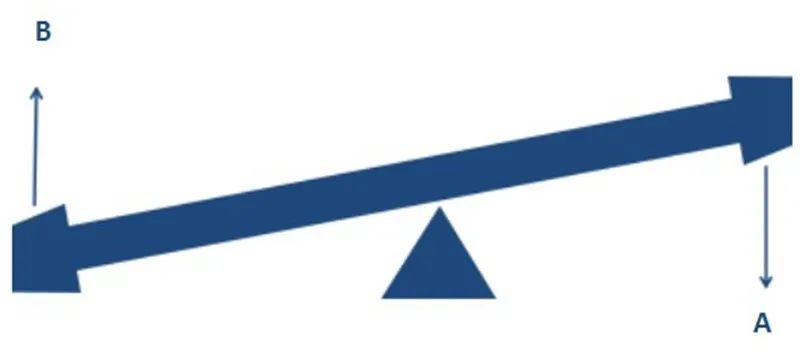
RTSA ಯ ತಿರುಗುವಿಕೆಯ ಕೇಂದ್ರದಲ್ಲಿನ ಬದಲಾವಣೆಯು ಇದೇ ರೀತಿಯ ಪರಿಣಾಮವನ್ನು ಬೀರುತ್ತದೆ, ಅಸ್ಥಿರಗೊಳಿಸಿದ ಭುಜವು ಆವರ್ತಕ ಪಟ್ಟಿಯ ಖಿನ್ನತೆಯಿಲ್ಲದೆ ಅಪಹರಣವನ್ನು ಪ್ರಾರಂಭಿಸಲು ಅನುವು ಮಾಡಿಕೊಡುತ್ತದೆ. ಆರ್ಕಿಮಿಡೀಸ್ ಹೇಳಿದಂತೆ: ನನಗೆ ಒಂದು ಆಧಾರಸ್ತಂಭವನ್ನು ನೀಡಿ, ನಾನು ಇಡೀ ಭೂಮಿಯನ್ನು ಚಲಿಸಬಲ್ಲೆ!
RTSA ಸೂಚನೆಗಳು ಮತ್ತು ವಿರೋಧಾಭಾಸಗಳು
RTSA ಯ ಶ್ರೇಷ್ಠ ಸೂಚನೆಯೆಂದರೆ ರೋಟೇಟರ್ ಕಫ್ ಟಿಯರ್ ಆರ್ತ್ರೋಪತಿ (CTA), ಇದು ಅಸ್ಥಿಸಂಧಿವಾತದೊಂದಿಗೆ ದೈತ್ಯ ರೋಟೇಟರ್ ಕಫ್ ಟಿಯರ್ ಆಗಿದೆ, ಇದು ಸಾಮಾನ್ಯವಾಗಿ ಹ್ಯೂಮರಲ್ ತಲೆಯ ಮೇಲ್ಮುಖ ಸ್ಥಳಾಂತರದಿಂದ ನಿರೂಪಿಸಲ್ಪಟ್ಟಿದೆ, ಇದರ ಪರಿಣಾಮವಾಗಿ ಗ್ಲೆನಾಯ್ಡ್, ಅಕ್ರೋಮಿಯನ್ ಮತ್ತು ಹ್ಯೂಮರಲ್ ತಲೆಯ ನಿರಂತರ ಕ್ಷೀಣಗೊಳ್ಳುವ ಬದಲಾವಣೆಗಳು ಕಂಡುಬರುತ್ತವೆ. ರೋಟೇಟರ್ ಕಫ್ ಅಪಸಾಮಾನ್ಯ ಕ್ರಿಯೆಯ ನಂತರ ಡೆಲ್ಟಾಯ್ಡ್ ಕ್ರಿಯೆಯ ಅಡಿಯಲ್ಲಿ ಅಸಮತೋಲಿತ ಬಲ ಜೋಡಿಯಿಂದ ಹ್ಯೂಮರಲ್ ತಲೆಯ ಮೇಲ್ಮುಖ ಸ್ಥಳಾಂತರ ಉಂಟಾಗುತ್ತದೆ. ವಯಸ್ಸಾದ ಮಹಿಳೆಯರಲ್ಲಿ CTA ಹೆಚ್ಚು ಸಾಮಾನ್ಯವಾಗಿದೆ, ಅಲ್ಲಿ ಕ್ಲಾಸಿಕ್ "ಸೂಡೋಪಾರಾಲಿಸಿಸ್" ಸಂಭವಿಸಬಹುದು.
ಕಳೆದ ಎರಡು ದಶಕಗಳಲ್ಲಿ ಭುಜದ ಆರ್ತ್ರೋಪ್ಲ್ಯಾಸ್ಟಿ, ವಿಶೇಷವಾಗಿ RTSA ಬಳಕೆ ಗಣನೀಯವಾಗಿ ಹೆಚ್ಚಾಗಿದೆ. RTSA ಅನ್ವಯದ ಆರಂಭಿಕ ಯಶಸ್ವಿ ಫಲಿತಾಂಶಗಳು, ಶಸ್ತ್ರಚಿಕಿತ್ಸಾ ತಂತ್ರದ ನಿರಂತರ ಅಭಿವೃದ್ಧಿ ಮತ್ತು ಈ ತಂತ್ರದ ಪ್ರವೀಣ ಅನ್ವಯದ ಆಧಾರದ ಮೇಲೆ, RTSA ಗಾಗಿ ಆರಂಭಿಕ ಕಿರಿದಾದ ಸೂಚನೆಗಳನ್ನು ವಿಸ್ತರಿಸಲಾಗಿದೆ ಮತ್ತು ಆದ್ದರಿಂದ, ಪ್ರಸ್ತುತ ನಡೆಸಲಾಗುವ ಹೆಚ್ಚಿನ ಭುಜದ ಆರ್ತ್ರೋಪ್ಲ್ಯಾಸ್ಟಿ ಕಾರ್ಯವಿಧಾನಗಳು RTSA ಆಗಿವೆ.
ಉದಾಹರಣೆಗೆ, ಹಿಂದೆ ಆವರ್ತಕ ಪಟ್ಟಿಯ ಹರಿದು ಹೋಗುವಿಕೆ ಇಲ್ಲದೆ ಭುಜದ ಅಸ್ಥಿಸಂಧಿವಾತಕ್ಕೆ ಅಂಗರಚನಾಶಾಸ್ತ್ರದ ಒಟ್ಟು ಭುಜದ ಆರ್ತ್ರೋಪ್ಲ್ಯಾಸ್ಟಿ (ATSA) ಆದ್ಯತೆಯ ಆಯ್ಕೆಯಾಗಿತ್ತು, ಆದರೆ ಇತ್ತೀಚಿನ ವರ್ಷಗಳಲ್ಲಿ, ಈ ದೃಷ್ಟಿಕೋನವನ್ನು ಹೊಂದಿರುವ ಜನರ ಸಂಖ್ಯೆ ಕ್ರಮೇಣ ಕಡಿಮೆಯಾಗುತ್ತಿರುವಂತೆ ತೋರುತ್ತದೆ. ಈ ಕೆಳಗಿನ ಅಂಶಗಳಿವೆ. ಕಾರಣಗಳು ಈ ಪ್ರವೃತ್ತಿಗೆ ಕಾರಣವಾಗಿವೆ. ಮೊದಲನೆಯದಾಗಿ, ATSA ಪಡೆಯುವ ರೋಗಿಗಳಲ್ಲಿ 10% ವರೆಗೆ ಈಗಾಗಲೇ ಆವರ್ತಕ ಪಟ್ಟಿಯ ಹರಿದು ಹೋಗುವಿಕೆ ಇದೆ. ಎರಡನೆಯದಾಗಿ, ಕೆಲವು ಸಂದರ್ಭಗಳಲ್ಲಿ, ಆವರ್ತಕ ಪಟ್ಟಿಯ "ಕಾರ್ಯ"ದ "ರಚನಾತ್ಮಕ" ಸಮಗ್ರತೆಯು ಪೂರ್ಣಗೊಂಡಿಲ್ಲ, ವಿಶೇಷವಾಗಿ ಕೆಲವು ವಯಸ್ಸಾದ ರೋಗಿಗಳಲ್ಲಿ. ಅಂತಿಮವಾಗಿ, ಶಸ್ತ್ರಚಿಕಿತ್ಸೆಯ ಸಮಯದಲ್ಲಿ ಆವರ್ತಕ ಪಟ್ಟಿಯು ಹಾಗೇ ಇದ್ದರೂ ಸಹ, ವಯಸ್ಸಿನೊಂದಿಗೆ, ವಿಶೇಷವಾಗಿ ATSA ಕಾರ್ಯವಿಧಾನಗಳ ನಂತರ ರೋಟೇಟರ್ ಪಟ್ಟಿಯ ಅವನತಿ ಸಂಭವಿಸುತ್ತದೆ ಮತ್ತು ಆವರ್ತಕ ಪಟ್ಟಿಯ ಕಾರ್ಯದ ಬಗ್ಗೆ ಹೆಚ್ಚಿನ ಅನಿಶ್ಚಿತತೆಯಿದೆ. ಈ ವಿದ್ಯಮಾನವು ಸಾಮಾನ್ಯವಾಗಿ 70 ವರ್ಷಕ್ಕಿಂತ ಮೇಲ್ಪಟ್ಟ ವಯಸ್ಸಾದ ರೋಗಿಗಳಲ್ಲಿ ಕಂಡುಬರುತ್ತದೆ. ಆದ್ದರಿಂದ, ಶುದ್ಧ ಭುಜದ ಅಸ್ಥಿಸಂಧಿವಾತವನ್ನು ಎದುರಿಸುವಾಗ ಹೆಚ್ಚು ಹೆಚ್ಚು ಶಸ್ತ್ರಚಿಕಿತ್ಸಕರು RTSA ಅನ್ನು ಆಯ್ಕೆ ಮಾಡಲು ಪ್ರಾರಂಭಿಸಿದರು. ಈ ಪರಿಸ್ಥಿತಿಯು ವಯಸ್ಸಿನ ಆಧಾರದ ಮೇಲೆ ಅಖಂಡ ಆವರ್ತಕ ಪಟ್ಟಿಯೊಂದಿಗೆ ಆರ್ಥೋರಿಟಿಸ್ ಹೊಂದಿರುವ ರೋಗಿಗಳಿಗೆ RTSA ಮೊದಲ ಆಯ್ಕೆಯಾಗಿರಬಹುದು ಎಂಬ ಹೊಸ ಚಿಂತನೆಗೆ ಕಾರಣವಾಗಿದೆ.
ಅದೇ ರೀತಿ, ಹಿಂದೆ, ಅಸ್ಥಿಸಂಧಿವಾತವಿಲ್ಲದೆ ಸರಿಪಡಿಸಲಾಗದ ಬೃಹತ್ ಆವರ್ತಕ ಕಫ್ ಕಣ್ಣೀರು (MRCT) ಗಾಗಿ, ಪರ್ಯಾಯ ವಿಧಾನಗಳಲ್ಲಿ ಸಬ್ಆಕ್ರೊಮಿಯಲ್ ಡಿಕಂಪ್ರೆಷನ್, ಭಾಗಶಃ ಆವರ್ತಕ ಕಫ್ ಪುನರ್ನಿರ್ಮಾಣ, ಚೈನೀಸ್ ಮಾರ್ಗ ಮತ್ತು ಮೇಲಿನ ಜಂಟಿ ಕ್ಯಾಪ್ಸುಲ್ ಪುನರ್ನಿರ್ಮಾಣ ಸೇರಿವೆ. , ಯಶಸ್ಸಿನ ಪ್ರಮಾಣವು ಬದಲಾಗುತ್ತದೆ. ವಿವಿಧ ಸಂದರ್ಭಗಳಲ್ಲಿ RTSA ಯ ಪ್ರಾವೀಣ್ಯತೆ ಮತ್ತು ಯಶಸ್ವಿ ಅನ್ವಯದ ಆಧಾರದ ಮೇಲೆ, ಹೆಚ್ಚು ಹೆಚ್ಚು ನಿರ್ವಾಹಕರು ಇತ್ತೀಚೆಗೆ ಸರಳ MRCT ಯ ಮುಖಾಂತರ RTSA ಅನ್ನು ಪ್ರಯತ್ನಿಸಿದ್ದಾರೆ ಮತ್ತು ಇದು 90% ಕ್ಕಿಂತ ಹೆಚ್ಚು 10 ವರ್ಷಗಳ ಇಂಪ್ಲಾಂಟೇಶನ್ ಬದುಕುಳಿಯುವಿಕೆಯ ದರದೊಂದಿಗೆ ಬಹಳ ಯಶಸ್ವಿಯಾಗಿದೆ.
ಸಂಕ್ಷಿಪ್ತವಾಗಿ ಹೇಳುವುದಾದರೆ, CTA ಜೊತೆಗೆ, RTSA ಗಾಗಿ ಪ್ರಸ್ತುತ ವಿಸ್ತೃತ ಸೂಚನೆಗಳಲ್ಲಿ ಉರಿಯೂತದ ಅಸ್ಥಿಸಂಧಿವಾತವಿಲ್ಲದೆ ದೊಡ್ಡ ಸರಿಪಡಿಸಲಾಗದ ಆವರ್ತಕ ಪಟ್ಟಿಯ ಕಣ್ಣೀರು, ಗೆಡ್ಡೆಗಳು, ತೀವ್ರವಾದ ಮುರಿತಗಳು, ಆಘಾತಕಾರಿ ನಂತರದ ಸಂಧಿವಾತ, ಮೂಳೆ ದೋಷಗಳು ಅಥವಾ ತೀವ್ರವಾಗಿ ವಿರೂಪಗೊಂಡ ಮೂಳೆ ಕೀಲುಗಳು, ಉರಿಯೂತ ಮತ್ತು ಮರುಕಳಿಸುವ ಭುಜದ ಸ್ಥಳಾಂತರಿಸುವಿಕೆಗಳು ಸೇರಿವೆ.
RTSA ಗೆ ಕೆಲವು ವಿರೋಧಾಭಾಸಗಳಿವೆ. ಸೋಂಕಿನಂತಹ ಕೃತಕ ಕೀಲು ಬದಲಿಯ ಸಾಮಾನ್ಯ ವಿರೋಧಾಭಾಸಗಳನ್ನು ಹೊರತುಪಡಿಸಿ, ಡೆಲ್ಟಾಯ್ಡ್ ಸ್ನಾಯುವಿನ ಕಾರ್ಯನಿರ್ವಹಣೆಯ ಕೊರತೆಯು RTSA ಗೆ ಸಂಪೂರ್ಣ ವಿರೋಧಾಭಾಸವಾಗಿದೆ. ಇದರ ಜೊತೆಗೆ, ಪ್ರಾಕ್ಸಿಮಲ್ ಹ್ಯೂಮರಸ್ ಮುರಿತಗಳಿಗೆ, ತೆರೆದ ಮುರಿತಗಳು ಮತ್ತು ಬ್ರಾಚಿಯಲ್ ಪ್ಲೆಕ್ಸಸ್ ಗಾಯಗಳನ್ನು ಸಹ ವಿರೋಧಾಭಾಸಗಳೆಂದು ಪರಿಗಣಿಸಬೇಕು, ಆದರೆ ಪ್ರತ್ಯೇಕವಾದ ಆಕ್ಸಿಲರಿ ನರ ಗಾಯಗಳನ್ನು ಸಾಪೇಕ್ಷ ವಿರೋಧಾಭಾಸಗಳೆಂದು ಪರಿಗಣಿಸಬೇಕು.
ಶಸ್ತ್ರಚಿಕಿತ್ಸೆಯ ನಂತರದ ಆರೈಕೆ ಮತ್ತು ಪುನರ್ವಸತಿ
ಶಸ್ತ್ರಚಿಕಿತ್ಸೆಯ ನಂತರದ ಪುನರ್ವಸತಿ ತತ್ವಗಳು:
ರೋಗಿಗಳ ಪುನರ್ವಸತಿ ಉತ್ಸಾಹವನ್ನು ಸಜ್ಜುಗೊಳಿಸಿ ಮತ್ತು ರೋಗಿಗಳಿಗೆ ಸಮಂಜಸವಾದ ನಿರೀಕ್ಷೆಗಳನ್ನು ಸ್ಥಾಪಿಸಿ.
ನೋವು ಮತ್ತು ಉರಿಯೂತವನ್ನು ಕಡಿಮೆ ಮಾಡುತ್ತದೆ ಮತ್ತು ಗುಣಪಡಿಸುವ ರಚನೆಗಳನ್ನು ರಕ್ಷಿಸುತ್ತದೆ, ಆದರೆ ಸಬ್ಸ್ಕ್ಯಾಪ್ಯುಲಾರಿಸ್ ಅನ್ನು ಸಾಮಾನ್ಯವಾಗಿ ರಕ್ಷಿಸುವ ಅಗತ್ಯವಿಲ್ಲ.
ಹೈಪರ್ ಎಕ್ಸ್ಟೆನ್ಶನ್, ಅಡಕ್ಷನ್ ಮತ್ತು ಆಂತರಿಕ ತಿರುಗುವಿಕೆ ಅಥವಾ ಅಪಹರಣ ಮತ್ತು ಬಾಹ್ಯ ತಿರುಗುವಿಕೆಯ ಕೊನೆಯ ಸ್ಥಾನಗಳಲ್ಲಿ ಭುಜದ ಜಂಟಿಯ ಮುಂಭಾಗದ ಸ್ಥಳಾಂತರಿಸುವುದು ಸಂಭವಿಸುವ ಸಾಧ್ಯತೆಯಿದೆ. ಆದ್ದರಿಂದ, ಶಸ್ತ್ರಚಿಕಿತ್ಸೆಯ ನಂತರ 4 ರಿಂದ 6 ವಾರಗಳವರೆಗೆ ಬ್ಯಾಕ್ಹ್ಯಾಂಡ್ಗಳಂತಹ ಚಲನೆಗಳನ್ನು ತಪ್ಪಿಸಬೇಕು. ಈ ಸ್ಥಾನಗಳು ಸ್ಥಳಾಂತರಿಸುವ ಅಪಾಯವನ್ನು ಹೊಂದಿರುತ್ತವೆ.
4 ರಿಂದ 6 ವಾರಗಳ ನಂತರವೂ, ಮೇಲಿನ ಚಲನೆಗಳು ಮತ್ತು ಸ್ಥಾನಗಳನ್ನು ಪ್ರಾರಂಭಿಸುವ ಮೊದಲು ಶಸ್ತ್ರಚಿಕಿತ್ಸಕರೊಂದಿಗೆ ಸಂವಹನ ನಡೆಸಿ ಅನುಮತಿ ಪಡೆಯುವುದು ಅವಶ್ಯಕ.
ಶಸ್ತ್ರಚಿಕಿತ್ಸೆಯ ನಂತರದ ಪುನರ್ವಸತಿ ವ್ಯಾಯಾಮಗಳನ್ನು ಮೊದಲು ತೂಕ ಹೊರುವಿಕೆ ಇಲ್ಲದೆ ಮತ್ತು ನಂತರ ತೂಕ ಹೊರುವಿಕೆಯೊಂದಿಗೆ, ಮೊದಲು ಪ್ರತಿರೋಧವಿಲ್ಲದೆ ಮತ್ತು ನಂತರ ಪ್ರತಿರೋಧದೊಂದಿಗೆ, ಮೊದಲು ನಿಷ್ಕ್ರಿಯವಾಗಿ ಮತ್ತು ನಂತರ ಸಕ್ರಿಯವಾಗಿ ನಿರ್ವಹಿಸಬೇಕು.
ಪ್ರಸ್ತುತ, ಯಾವುದೇ ಕಟ್ಟುನಿಟ್ಟಾದ ಮತ್ತು ಏಕರೂಪದ ಪುನರ್ವಸತಿ ಮಾನದಂಡವಿಲ್ಲ, ಮತ್ತು ವಿಭಿನ್ನ ಸಂಶೋಧಕರ ಯೋಜನೆಗಳಲ್ಲಿ ಹೆಚ್ಚಿನ ವ್ಯತ್ಯಾಸಗಳಿವೆ.
ರೋಗಿಯ ದೈನಂದಿನ ಜೀವನ ಚಟುವಟಿಕೆಗಳು (ADLs) ತಂತ್ರ (0-6 ವಾರಗಳು):

ಡ್ರೆಸ್ಸಿಂಗ್

ನಿದ್ರೆ
ದೈನಂದಿನ ವ್ಯಾಯಾಮ ತಂತ್ರ (0-6 ವಾರಗಳು):

ಸಕ್ರಿಯ ಮೊಣಕೈ ಬಾಗುವಿಕೆ

ನಿಷ್ಕ್ರಿಯ ಭುಜದ ಬಾಗುವಿಕೆ
ಸಿಚುವಾನ್ ಚೆನಾನ್ಹುಯಿ ಟೆಕ್ನಾಲಜಿ ಕಂ., ಲಿಮಿಟೆಡ್.
ವಾಟ್ಸಾಪ್: +8618227212857
ಪೋಸ್ಟ್ ಸಮಯ: ನವೆಂಬರ್-21-2022





